5. CAN (CONTROLLER AREA NETWORK) COMMUNICATION; 5. CAN (CONTROLLER AREA NETWORK) - Page 636
Kubota L3560 Owners Manual
Table of Contents
ELECTRICAL SYSTEM
L3560, L4060, L4760, L5060, L5460, L6060, WSM
9-M50
5. CAN (CONTROLLER AREA NETWORK)
COMMUNICATION
The Controller Area Network (CAN) specification
defines the Data Link Layer, ISO 11898 defines the
Physical Layer.
The CAN bus [CANbus] is a Balanced (differential)
2-wire interface running over a Shielded Twisted Pair
(STP), WIRING HARNESS (4) and (5). The Bit Encoding
used is Non Return to Zero (NRZ) encoding (with
bit-stuffing) for data communication on a differential two
wire bus. The use of NRZ encoding ensures compact
messages with a minimum number of transitions and
high resilience to external disturbance.
A number of data rates is 500 kbps (kilo bits per
second).
The CAN Bus interface uses an asynchronous
transmission scheme controlled by start and stop bits at
the beginning and end of each character. This interface
is used, employing serial binary interchange. Information
is passed from transmitters to receivers in a data frame.
The first merit of the CANbus is that the wiring
harness becomes simplified.
The second merit of the CANbus is that the output
signal data of sensors and switches connected with ECU
can be shared by each ECU.
9Y1210824ELM0081US0
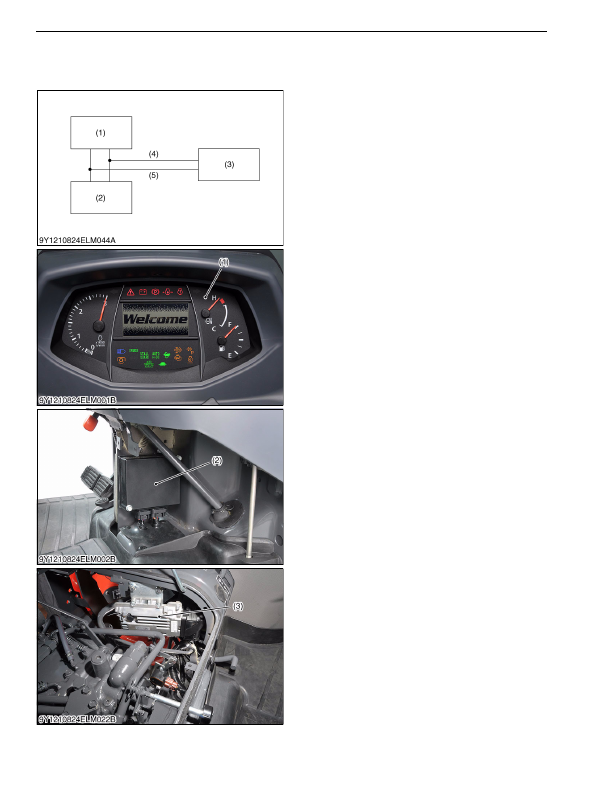
(1) Instrument Panel
(2) Main ECU
(3) Engine ECU
(4) Wiring Harness (CAN BUS
High)
(5) Wiring Harness (CAN BUS
Low)
KiSC issued 03, 2016 A
Detailed Information for Kubota L3560 Owners Manual
Lists of information found in Kubota L3560 Owners Manual - Page 636
- 5. CAN (CONTROLLER AREA NETWORK) COMMUNICATION The Controller Area Network (CAN) specification defines the Data Link Layer, ISO 11898 defines the Physical Layer.